حتما درباره پرینترهای سه بعدی رباتیک شنیده اید. ربات هایی که قادر هستند بدون محدودیت زمان و اندازه به ساخت اشیا مورد نیاز ما بپردازند. اما محققان به دستاوردی بی نظیر از خدمات پرینت سه بعدی دست یافته اند که کاملا متفاوت با ربات های پرینت سه بعدی معمول است. آنها ربات شبکه ای را با کمک پرینت سه بعدی ساخته اند که قادر است با خاصیت های خاصی که دارد در آب شناور بماند و اشیاء را بگیرد! در ادامه بیشتر بخوانید.
پرینت سه بعدی ربات شبکه ای شناور با قابلیت گرفتن اشیاء
محققان کارهای زیادی با مواد پرینت سه بعدی مغناطیسی انجام داده اند. یک تیم تحقیقاتی در دانشگاه ایالتی کارولینای شمالی ربات های شبکه ای (Mesh) را با پرینت سه بعدی ساختارهای سیلیکونی با کارکرد مغناطیسی قابل برنامه ریزی توسعه داده اند. در نتیجه، آنها ساختارهای هوشمند الاستومریکی را ایجاد کرده اند که در واکنش به میدان مغناطیسی مجددا تغییر شکل می دهند. این روباتها می توانند اشیا را انتخاب کنند و یا در توسعه ربات های نرم و یا ابزار پزشکی مفید باشند.
محققان بر این باورند که اگرچه ربات ها برای انجام وظایف ساده بهتر هستند، اما آنها فقط یک نمونه اولیه می باشند. اورلین ولو، نویسنده متناظر این تحقیق می گوید: “این تحقیق قابلیت های موجود در زمینه در حال ظهور ترکیب پرینت سه بعدی و رباتیک نرم را نشان می دهد. در حال حاضر، این یک مرحله اولیه در تولید عملگر نرم رباتیکی است.”
عملگرهای فوق نرم بر اثر تعامل با نیروهای مغناطیسی تغییر شکل می دهند، این رخداد سبب آزاد شدن یا پیچش در ذرات کربونیل آهن درون آنها می شود. یکی از اثبات های مفاهیمی که محققان ارائه دادند، مکانیسمی برای نگه داشتن قطرات آب بود. این ربات در زمان اعمال میدان مغناطیسی قطرات را گرفته و در زمان نبودن میدان آن ها را آزاد می کند. این طراحی می تواند یک راه عالی برای حمل مایعات یا مخلوط کردن آنها در شرایط آزمایشگاهی باشد.
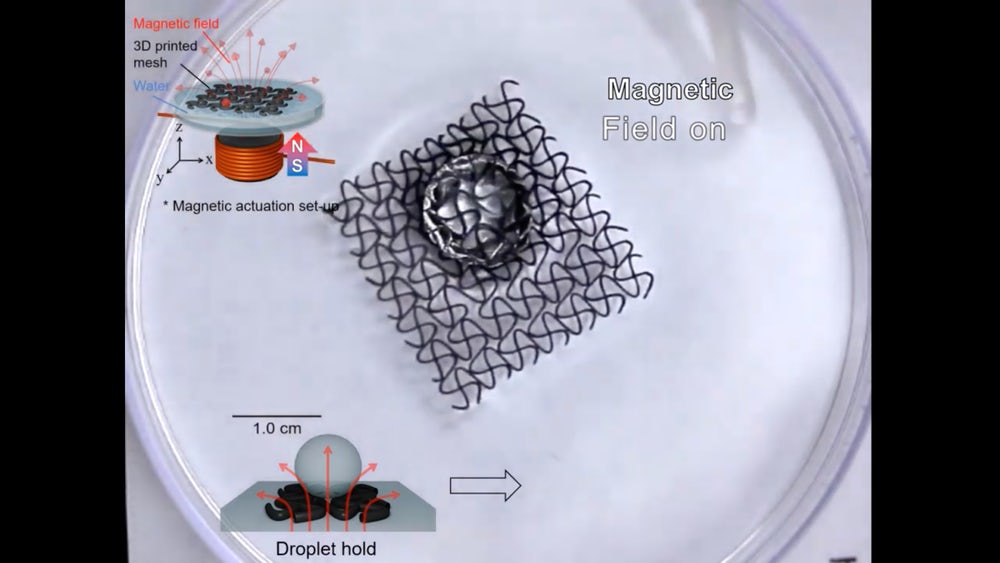
این ربات ها شامل میکرو مهره های سیلیکونی، سیلیکون مایع، آب و ذرات کربنیک آهن هستند. با توجه به توانایی این ربات در تعامل با آهنرباها به روشهای منحصر به فرد، محققان از مجموعه ای از تنظیمات متفاوت برای مقاصد مختلف استفاده کردند.
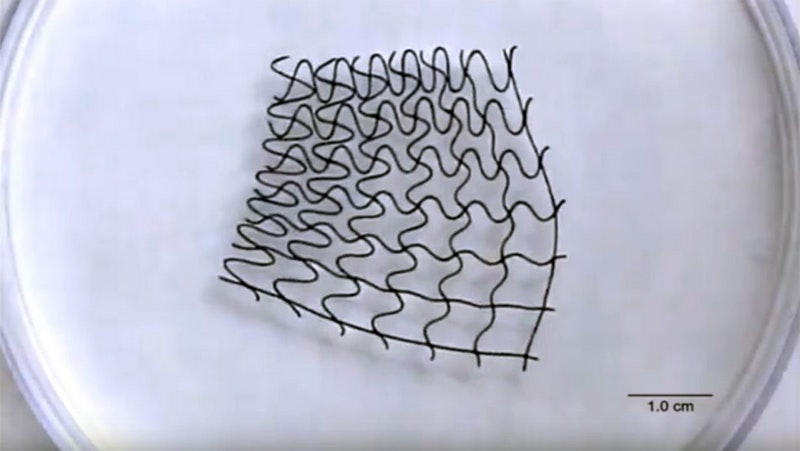
این ربات ها دارای یک ساختار شبکه ای به شکل فنر هستند که یک چنگال در یک طرف آن قرار دارد. هنگامی که میدان مغناطیسی روشن است، بخش فنر مانند جمع شده و چنگال را با خود می کشد. غیر فعال کردن میدان اجازه می دهد تا چنگال گسترش یافته و یک توپ کوچک آلومینیومی را بگیرد. این یک سیستم ربات شبکه ای بسیار ساده اما در عین حال بسیار تاثیر گذار می باشد.
پرینت سه بعدی ما را قادر به تولید ساختار های نرم با حالت های مختلف عملگرایی مانند انقباض ایزوتروپیک / آنیزوتروپیک و تغییرات شکل چندگانه، و نیز تنظیم مجدد عملکرد می سازد. شبکه هایی که در حضور میدان های مغناطیسی مجددا شکل می گیرند و به محرک های خارجی، با تغییر شکل دادن پاسخ می دهند. این سیستم ها می توانند به عنوان داربست های بافت فعال برای کشت سلول ها و یا ربات های نرم ساخته شده به تقلید از موجودات زنده ای که در سطح آب زندگی می کنند، مورد استفاده قرار گیرند.
ساخت ربات شبکه ای کاری بی نظیر در دنیای پرینت سه بعدی
ساخت ربات های شبکه ای از لحاظ پرینت سه بعدی کاملا بی نظیر بود. محققان به طور آزمایشی، پرینتر سه بعدی خود را با استفاده از طراحیCNC از OpenBuilds ساختند. آنها این پرینتر سه بعدی را به منظور استفاده از محفظه سرنگNordson EFD به جای یک اسپیندل معمولی CNC سفارشی سازی کردند. فشار پنوماتیک بر روی محفظه سرنگ به وسیله یک Dispenser Fluid Performus V تنظیم شده و میزان تزریق را کنترل شده می کند. این امر به دلیل استفاده از نازل پلی اتیلن ۲۷ ضرورت دارد. حرکت در راستای x-y-z توسط یک برد میکروکنترلر Arduino Mega 2560 کنترل می شود.
منبع: https://3dprinting.com/
در صورت تمایل میتوانید فایل PDF این مقاله را در قسمت زیر دانلود و با ذکر منبع مورد استفاده قرار دهید.

pdf پرینت سه بعدی ربات شبکه ای
تهیه و تنظیم مقاله از : خدمات پرینت سه بعدی آی دیزاین


ثبت ديدگاه