یک گروه از محققان موسسه Wyss دانشگاه هاروارد و آزمایشگاه فناوری اطلاعات و هوش مصنوعی موسسه ماساچوست و یا MIT CSAIL یک ربات گریپر توسعه داده اند که از یک ساختار ارگونومی پرینت سه بعدی شده برای بالا بردن اشیا با وزنی تا ۱۰۰ برابر وزن خود استفاده می کند. این ربات با استفاده از یک طراحی منحصر به فرد برای یک دست رباتیکی قادر است طیف گسترده ای از اشیاء مانند قوطی سوپ، چکش، شیشه ها و حتی یک گل کلم بروکلی را گرفته وبالا ببرد.
ربات گریپر پرینت سه بعدی شده
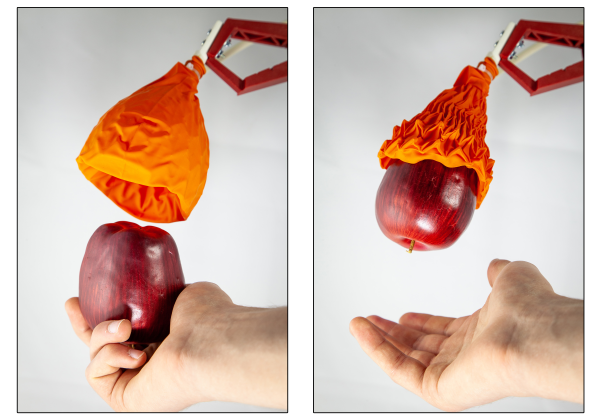
این ربات با یک شکل مخروطی، توخالی خلاء از یک “توپ جادویی ارگونومی” الهام گرفته است که از سه بخش شامل یک اسکلت لاستیکی سیلیکون حاوی ۱۶ قطعه چاپ سه بعدی شده، یک پوشش محافظ جهت پوشاندن ساختار و اتصال دهنده تشکیل شده است. این ساختار در اطراف یک شیء به نحوی مشابه یک دام ونوس (گیاه مگس خوار) پایین می آید و خلاء باعث جمع شدن گیره ای که در اطراف شیء عمل می کند، می گردد. این گیره ربات نرم می تواند با شکل هر چیزی که آن را جذب می کند بدون آسیب رساندن به آن سازگار شود.
رابرت وود، یکی از نویسندگان و استاد دانشکده مهندسی هاروارد و بخش مهندسی زیست شناسی موسسه Wyss می گوید: “یکی از ویژگی های کلیدی این روش در ساخت و ساز بازوهای مکانیکی، سادگی آن است. مواد و استراتژی های تولیدی استفاده شده، برای ما این امکان را فراهم کرد تا به سرعت نمونه اولیه گریپرهای جدید و سفارشی سازی شده برای شی یا محیط زیست مورد نیاز ساخته شود.”

ساخت یک ربات گریپر به کمک پرینت سه بعدی
این تیم روبات گریپر را برای تست قدرت نسبت به اشیا مختلف، روی یک ربات استاندارد نصب کردند. نتیجه این آزمایش نشان داد که این گیره قادر به گرفتن و بلند کردن اشیایی با ۷۰ درصد قطر خود و ۱۲۰ برابر وزن خود بدون آسیب رساندن به آنها می باشد. این ربات همچنین می تواند بطری هایی با وزن بیش از چهار پوند را بلند کند.
طبق گفته های Shuguang Li دانشجوی فوق دکترای MIT CSAIL و دانشکده علوم کاربردی و مهندسی جان آ. پالسون در دانشگاه هاروارد (SEAS)، این ربات در حال حاضر برای اشیاء استوانه ای مانند بطری ها یا قوطی ها به بهترین شکل عمل می کند.

پرینت سه بعدی یک ربات گریپر
Li گفت: “شرکت هایی مانند آمازون و JD می خواهند بتوانند یک مجموعه گسترده تر از اشیاء ظریف و یا نامنظم را بلند کنند اما نمی توانند این کار را با گیره های انگشتی و یا گریپرهای پایه بادکشی انجام دهند. گریپرهای پایه بادکشی نمی تواند چیز های دارای سوراخ را بلند کند و هم چنین آنها نیاز به چیزی بسیار قوی تر از یک گیره نرم انگشتی دارند.”
با توجه به محدویت های موجود در ربات های ارگونومی، همچنان امکان ایجاد اصلاحات وجود دارد. با توجه به مکانیزم، این ربات ممکن است در بلند کردن اجسام مسطح مانند کتابها با مشکل مواجه شود. این تیم امیدوار است در آینده بتواند یک سیستم نظارت کامپیوتری به ربات اضافه کند که اجازه دهد تا گیرنده ببیند چه کاری انجام می دهد و هم چنین این امکان را فراهم کند تا بخش های خاصی از قطعه را بگیرد.
مایکل ورنر، استادیار رباتیک دانشگاه کالیفرنیا سانتا کروز گفت: “این ربات یک دستگاه بسیار هوشمند است که از قدرت پرینت سه بعدی، یک خلاء و رباتیک نرم برای برطرف کردن مشکل گرفتن با یک روش کاملاَ جدید استفاده می کند. می توانم تصور کنم که در سال های آتی، روبات های نرم به اندازه ای پیشرفت کنند که بتوانند ماهرانه یک گل رز را بلند کنند یا به اندازه کافی نیرومند که یک بیمار را در بیمارستان بلند کنند.”
فیلم زیر ربات گریپر پرینت سه بعدی شده را نشان می دهد.
منبع: https://www.3ders.org
در صورت تمایل میتوانید فایل PDF این مقاله را در قسمت زیر دانلود و با ذکر منبع مورد استفاده قرار دهید.
تهیه و تنظیم مقاله از : خدمات پرینت سه بعدی آی دیزاین



ثبت ديدگاه