

محققان مؤسسه فناوری ماساچوست (MIT) با استفاده از تکنولوژی پرینتر سه بعدی یک دست رباتیکی با حسگرهای لمسی که می تواند هویت یک شی را تنها با یک بار گرفتن تشخیص دهد توسعه داده اند. با توجه به بحران جمعیت پیری که بسیاری از کشورها با آن مواجه هستند، این فناوری به طور فزاینده ای اهمیت می یابد زیرا دست های رباتیکی می توانند در مراقبت های پزشکی در آینده ارزشمند باشند. تا به حال پروژه های مختلفی با محوریت توسعه دست های رباتیکی انجام شده است که مشکل بسیاری از آنها عدم توانایی شناسایی اشیاء می باشد. این به این دلیل است که سنسورها در اکثر دست های رباتیکی فقط در نوک انگشتان قرار دارند به این معنی که برای تشخیص یک شی، جسم باید مکرراً گرفته شود. یا در برخی دیگر، دستگاه به حسگرهایی با قدرت کمتر مجهز هستند که اگرچه در سراسر انگشت به صورت یکپارچه تعبیه شده اند اما اطلاعات کمتری را جمع آوری می کنند.
ساخت دست رباتیکی با قابلیت تشخیص اشیاء با استفاده از تکنولوژی پرینت سه بعدی
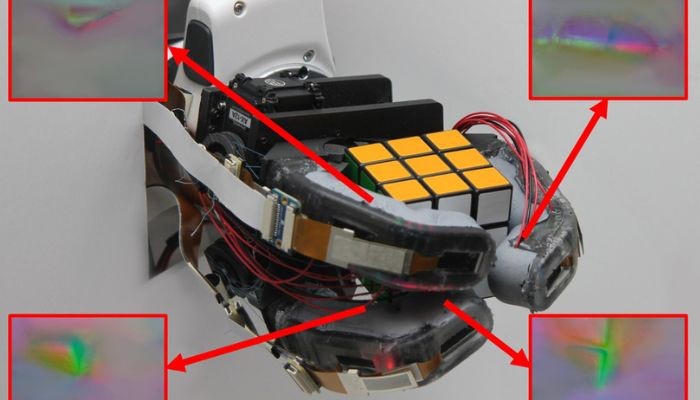
اکنون، محققان MIT با موفقیت نمونه اولیه جدیدی را توسعه داده اند که می تواند این مشکلات را برطرف کند. این ربات سه انگشتی دارای یک اسکلت مقاوم پرینت سه بعدی شده است که قابلیت گرفتن اجسام سنگین را نیز دارد. این تیم پس از تکمیل فرایند طراحی دریافتند که بهترین چیدمان شامل قرار گرفتن دو انگشت در الگوی Y با انگشت سوم است که امکان درک بهتر را فراهم می کند. اسکلت توسط یک لایه انعطاف پذیر و نرم احاطه شده است تا انعطاف لازم برای گرفتن دقیق اجسام را فراهم سازد. این لایه شامل سنسورهایی با وضوح بالا است. حسگرهای ذکر شده با استفاده از دوربین و LEDطیف وسیعی از داده های بصری را در سراسر طول انگشت جمع آوری می کنند.
ساخت دست رباتیکی با قابلیت تشخیص اشیاء با استفاده از تکنولوژی پرینت سه بعدی
Sandra Liu، دانشجوی دانشکده مهندسی مکانیک و یکی از نویسندگان مقاله تحقیقاتی این انگشت روباتیکی چاپ سه بعدی شده، درباره اهمیت آن اینگونه توضیح داد: “داشتن عناصر نرم و صلب و همچنین توانایی حس عالی در یک ناحیه بزرگ در هر دستی بسیار مهم است، به ویژه اگر بخواهیم کارهای بسیار پیچیده ای مانند آنچه که دست خودمان میتواند انجام دهد را در نظر بگیریم. هدف ما از این پروژه این بود که هر آنچه دست های انسان را تشکیل می دهد در یک انگشت روباتیکی ترکیب کنیم که بتواند کارهایی را انجام دهد که دیگر انگشتان رباتیک در حال حاضر نمی توانند انجام دهند.” این مقاله تحقیقاتی توسط Liu و Leonardo Zamora Yañez و با راهنمایی مشاور آنها، Edward Adelson، نوشته شده است. آنها امیدوارند با گذشت زمان سخت افزار را بهبود بخشند تا استهلاک را کاهش داده و امکان انجام کارهای متنوع تری را برای انگشت شست فراهم سازند.
منبع: https://www.3dnatives.com/
در صورت تمایل میتوانید فایل PDF این مقاله را در قسمت زیر دانلود و با ذکر منبع مورد استفاده قرار دهید. 



ثبت ديدگاه