
پیش از این می دانستیم که مورچه ها می توانند تا ۱۰۰ برابر وزن بدن خود را تحمل کنند. به تازگی محققان موفق شده اند یک دست روباتیکی بسازند که به لطف استفاده از تکنولوژی پرینتر سه بعدی می تواند ۱۰۰۰ برابر وزن خود را حمل کند. این دستاورد توسط پژوهشگران ایتالیایی در مؤسسه فناوری ایتالیا (IIT) محقق شده است. این تیم موفق به تولید یک دست رباتیکی شده اند که با تنها ۸ گرم وزن، می تواند ۸ کیلوگرم را بلند کند و در عین حال حرکات دست شبیه عضلات انسان را انجام دهد. در این پروژه تحقیقاتی کهGRACE نامگذاری شده است، دست رباتیکی برای انجام حرکات با اعمال فشار بر روی غشاهای محرک مختلف کار می کند.
ساخت دست رباتیکی با قابلیت تحمل ۱۰۰۰ برابر وزن با استفاده از تکنولوژی پرینت سه بعدی
به طور خاص،GRACE چیزی است که به عنوان یک عملگر شناخته می شود. در واقع این قطعه قادر است انرژی و سیگنال ها را به حرکت تبدیل کرده و در نتیجه دستوراتی مانند بلند کردن اشیا را اجرا کند. بنابراین، این دست رباتیکی پرینت سه بعدی شده که به عنوان ماهیچه های مصنوعی کار می کند، نمایانگر پروژه ای می باشد که ممکن است در آینده به پیشرفت ربات ها منجر شود. یکی از محققان مؤسسه IIT به نام De Pascali نقطه شروع این پروژه را اینگونه توصیف کرد: “ما از ماهیچه مصنوعی سنتی شروع کردیم و نوع جدیدی از عضلات مصنوعی ساخته شده از یک جزء یکپارچه را توسعه دادیم.”

ساخت دست رباتیکی با قابلیت تحمل ۱۰۰۰ برابر وزن با استفاده از تکنولوژی پرینت سه بعدی
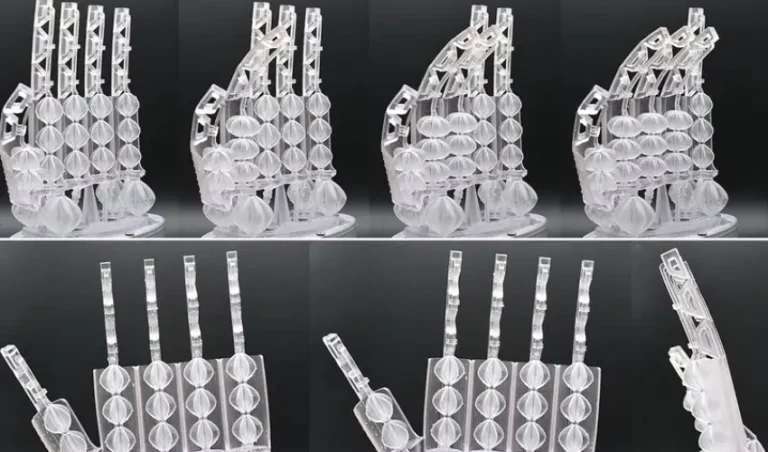
دست رباتیکی پرینت سه بعدی شده
البته طراحی ربات ها با ماهیچه های مصنوعی جدید نیست، اما چیزی که عملگرهای GRACE را متمایز می کند، این واقعیت است که غشای آنها دارای چین هایی است. این چین ها تا حد زیادی مسئول قدرت بسیار زیاد و انعطافپذیری این ماهیچه های مصنوعی هستند که می توانند مانند ماهیچه های انسان حرکت کنند. از طرف دیگر، این غشاها با استفاده از دستگاه چاپگر سه بعدی و رزین انعطاف پذیر تولید شده اند. ماهیچه های مصنوعی پرینت سه بعدی شده می تواند مشابه ماهیچه انسان تا حدی کشیده شده و سپس دوباره منقبض شود. طبق گفته این تیم تحقیقاتی، قبلاً در توسعه ربات ها از رزین های سخت استفاده می شد که دامنه حرکت را محدود می کرد، اما در این ربات از رزین با انعطافپذیری بالا استفاده شده است.
نقطه شروع در این پروژه یک مدل ریاضی است که توسط محققان توسعه یافته است. مواد پرینت سه بعدی مورد استفاده و عرض آن بسته به مدل دقیق و فرآیند ساخت عملگر ممکن است متفاوت باشد، که به نوبه خود بر نیروی گرفتن اشیاء در ربات تأثیر می گذارد. تیم تحقیقاتی در جریان این پروژه، ۱۸ عملگر با اندازه های مختلف را در یک دست روباتیکی دارای مچ ایجاد کردند. قدرت عضلانی و همچنین تقلید در بخش های مختلف بدن بسته به اینکه چه مدل و چند عملگر ترکیب شده است، می تواند تحت تأثیر قرار گیرد. این یک پروژه هیجان انگیز است که در بریتانیای کبیر نیز با استقبال زیادی روبرو شده است.
منبع: www.3dnatives.com
در صورت تمایل میتوانید فایل PDF این مقاله را در قسمت زیر دانلود و با ذکر منبع مورد استفاده قرار دهید. 
pdf پرینت سه بعدی دست رباتیکی با قابلیت حمل ۱۰۰۰ برابر وزن خود.docx



ثبت ديدگاه