

یک ماهی روباتیک الهام گرفته از طبیعت و با مکانیسم دم انعطاف پذیر می تواند در میان همتایان خود با مصرف کمتر و مانور بیشتر در عمقی از آب که زیردریایی نمی تواند به آن دسترسی پیدا کند، شنا می کند. این نوع روبات ها برای اکتشافات زیر آب و اهداف مشاهده و تحقیق مخصوصاَ در مواردی که نیاز به مانور قابل قبول است، ترجیح داده می شوند. گروهی از محققان مهندسی از دانشگاه فرات در ترکیه از طراحی زیستی و پرینت سه بعدی برای ساخت یک ماهی هوشمند رباتیک برای مأموریت های اکتشاف و بررسی در دنیای واقعی استفاده می کنند.
پرینت سه بعدی ماهی
تیم محقق نتیجه کار خود را در مقاله ای با عنوان “طراحی مکاترونیکی و ساخت ماهی هوشمند رباتیکی برای حالت های شناخته شده شنا” توسط مصطفی ای، دنیس کورکماز، گونکا اوزمن کوکا، کفر بال، زوهوهاکان اکپولات و مصطفی کان بیینگول منتشر کرده است.

این مقاله طراحی مکاترونیکی و ساخت یک نمونه اولیه از مدل بیومیمتیک ماهی رباتیکی Carangid با مکانیزم دم دو میله ای را ارائه می دهد. برای روش طراحی از اندازه و ساختار مکانیزم بیومیمِتیک چند میله ای، که از ویژگی های فیزیکی یک ماهی کپور واقعی اقتباس شده است استفاده کرده اند. سرعت مناسب بدن با توجه به حالت شنا و نوسانات دم کپور تعیین می شود. ویژگی های ماهی های روباتیکی با حرکت رو به جلو، حرکت چرخشی، حرکت رو به بالا و پایین و شنای مستقل در استخر آزمایشی مشخص می شود. حداکثر سرعت رو به جلوی ماهی های روباتیکی می تواند به ۱BLs-8516/0 برسد و عملکرد عالی شنای سه بعدی به دست می آید.
عوامل مهم در طراحی سه بعدی ماهی رباتیکی بیومیمتیک، حالت شنا و ساختار بدن ماهی است. در علم ماهی شناسی، بیش از ۸۵ درصد از ماهی ها با خم شدن بدن و یا باله های دمی (BCF) و حدود ۱۵ درصد ماهی ها با باله های میانی و یا گردنی (MPF) شنا می کنند. این خواص بیولوژیکی نشان می دهد که مدل ربات Carangiform نوع BCF روش مناسب برای طراحی زیردریایی است.
دو روش اساسی در طراحی ماهی های رباتیکی وجود دارد. مورد اول طراحی بیومیمتیک است که دارای الزامات خاصی از قبیل دم با اندازه خاص و تعداد مفصل های معین برای ارائه حرکت موجی بدن و توانایی ماندن در عمق خاص با کنترل مرکز ثقل است. روش دوم طراحی فقط از اثرات جنبش ماهی استفاده می کند اما از لحاظ فیزیکی از ماهی های واقعی الهام گرفته نشده است.
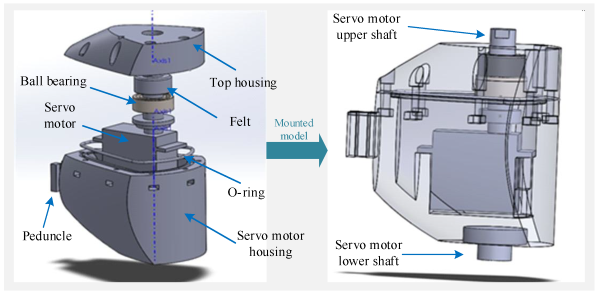
ماهی های روباتیکی نوع BCF دارای یک مکانیزم دم جلوبرنده می باشد که توسط سروو موتور ها هدایت می شود. نمونه اولیه ماهی رباتیکی متشکل از پنج جزء اساسی شامل بدنه اصلی قدامی سلب، مکانیزم دو میله ای دم، واحد کنترل مدل ژنراتور الگوی مرکزی (CPG)، واحد بینایی جلو و باله انعطاف پذیر است. بدنه اژدر شکل قدامی سلب به منظور جای گذاری سیستم الکترونیکی، سنسورها و مکانیزم کنترل مرکز ثقل (CoG) طراحی شده است. مکانیزم کنترل مرکز ثقل با موفقیت توانایی حرکت به سمت بالا و پایین را فراهم می کند. کنترل کننده حرکت مبتنی بر CPG برای ایجاد الگوهای شنای نوسانی ریتمیک طراحی شده است. لینک های دم توسط موتورهای سروو با قدرت بالا به حرکت در می آیند و یک باله ی وابسته به دم انعطاف پذیر به منظور ایجاد حرکت موجی بدنه نمونه اولیه طراحی شده است. این لینک ها به شکل یک ساختار زنجیره ای سری به یکدیگر متصل هستند و نیروی پرتابی مورد نیاز برای حرکات شنا را تولید می کنند. ماهیان رباتیکی باید بتوانند موانع استاتیکی و دینامیکی محیط را در هنگام حرکت درون آب حس کنند. این تیم سه سنسور فاصله مادون قرمز را در سمت چپ، راست و جلو ماهی های روباتیکی قرار داده است.

مدل های سه بعدی ماهی های روباتیک در SolidWorks طراحی شده اند. سپس فایل های STL به منظور تنظیم لایه ها، پرینت سه بعدی و پشتیبانی، به فرمت Voxel تبدیل می شوند. هر قسمت از نمونه اولیه با فیلامنت PLA پرینت سه بعدی شده و باله انعطاف پذیر با استفاده از قالب سیلیکون ساخته شده است. قالب باله بیرونی نیز با تکنولوژی پرینت سه بعدی طراحی و تولید می شود. تمام قطعات با رزین اپوکسی به منظور جلوگیری از نشت احتمالی از روزنه های ایجاد شده در فرآیند تولید، پوشانده می شوند. پس از مرحله مونتاژ، سطح بیرونی با رنگ مصنوعی پوشش داده می شود تا از نشت هایی که ممکن است در اثر ترک های مویرگی ایجاد شده در هنگام مونتاژ به وجود آید جلوگیری کنند.
نمونه اولیه ماهی رباتیکی حدود ۵۰۰ میلی متر طول، ۷۶ میلی متر عرض و ۲۱۵ میلی متر ارتفاع دارد. جرم این نمونه اولیه حدود ۱/۳ کیلوگرم است.
نمونه اولیه ماهی رباتیکی با توانایی حرکت سه بعدی در سیستم آزمایش واقعی توسعه داده شده است. در این بررسی ها، بیش از ۷۲ مطالعۀ مختلف تجربی برای به دست آوردن خصوصیات نمونه اولیه انجام شده است. برای تست عملکرد آب بندی، قطعات نصب شده به مدت ۶ ساعت در یک استخر پر از آب قرار گرفتند. نتیجه تست های آب بندی موفقیت آمیز بود.
در آینده کنترل حلقه بسته نمونه اولیه مورد آزمایش قرار خواهد گرفت و عملکرد شنای روبات در جریان های مختلف آزمایش خواهد شد.
این طرح ماهی رباتیکی راه حل های متنوعی برای کاربردهای مختلف دریایی مانند بررسی منابع آب زیرزمینی، تعیین آلودگی دریاها، مشاهده فرم های زنده، تشخیص خطا در برق یا خطوط لوله نفت، امنیت سواحل و ماموریت های نظامی را فراهم می کند.
در فیلم زیر می توانید این ماهی رباتیکی هوشمند را مشاهده کنید.
منبع: http://www.3ders.org/
برای اینکه بدانید برای سفارش یک پروژه پرینت سه بعدی چه گام هایی را باید بردارید و آشنایی با نکات مهم برای سفارش حتما مقاله سفارش پرینت سه بعدی را مطالعه کنید.
در صورت تمایل میتوانید فایل PDF این مقاله را در قسمت زیر دانلود و با ذکر منبع مورد استفاده قرار دهید.
![]() pdf پرینت سه بعدی ماهی رباتیک هوشمند
pdf پرینت سه بعدی ماهی رباتیک هوشمند
تهیه و تنظیم از: پرینتر سه بعدی آیدیزاین



ثبت ديدگاه